Модель «хищник - жертва» и макроэкономическая модель Гудвина
Рассмотрим биологическую модель «хищник - жертва», в которой один вид является кормом для другого. Эта модель, давно ставшая классической, была построена в первой половине XX в. итальянским математиком В. Вольтерра для объяснения колебаний уловов рыбы в Адриатическом море . В модели предполагается, что число хищников растет до тех пор, пока у них будет достаточно пищи, а увеличение поголовья хищников приводит к уменьшению популяции рыб-жертв. Когда последних становится мало, численность хищников уменьшается. Вследствие этого с некоторого момента начинается рост численности рыб-жертв, который через некоторое время вызывает рост популяции хищников. Цикл замыкается.
Пусть N x (t) и N 2 (t) - численности рыб-жертв и рыб-хищников в момент времени t соответственно. Предположим, что темп прироста численности жертв в условиях отсутствия хищников постоянен, т. е.
где а - положительная постоянная.
Появление хищника должно снизить темп прироста жертв. Будем считать, что это снижение линейно зависит от численности хищника: чем больше хищников, тем меньше темп прироста жертв. Тогда

где т > 0.
Поэтому для динамики численности рыб-жертв получаем:
Составим теперь уравнение, определяющее динамику популяции хищников. Предположим, что их численность в случае отсутствия жертв сокращается (из-за отсутствия корма) с постоянным темпом Ь, т. е.
![]()
Наличие жертв вызывает увеличение темпа прироста хищников. Предположим, что этот прирост линеен, т. е.
![]()
где п> 0.
Тогда для скорости роста рыб-хищников получаем уравнение:
В системе «хищник - жертва» (6.17)-(6.18) снижение скорости роста численности рыб-жертв, вызванное поеданием их хищниками, равно mN x N 2 , т. е. пропорционально числу их встреч с хищником. Увеличение скорости роста численности рыб-хищников, вызванное наличием жертв, равно nN x N 2 , т. е. тоже пропорционально числу встреч жертв и хищников.
Введем безразмерные переменные U = mN 2 /a и V = nN x /b. Динамика переменной U соответствует динамике хищников, а динамика переменной V - динамике жертв. В силу уравнений (6.17) и (6.18) изменение новых переменных определяется системой уравнений:
Предположим, что при t = 0 число особей обоих видов известно, следовательно, известны начальные значения новых переменных?/(0) = U 0 , К(0) = К 0 . Из системы уравнений (6.19) можно найти дифференциальное уравнение для ее фазовых траекторий:

Разделяя переменные этого уравнения, получим:


Рис. 6.10. Построение фазовой траектории ADCBA системы дифференциальных уравнений (6.19)
Отсюда с учетом начальных данных следует:
где константа интегрирования С = b(V Q - InV 0)/a - lnU 0 + U 0 .
На рис. 6.10 показано, как строится линия (6.20) при заданном значении С. Для этого в первой, во второй и в третьей четвертях соответственно строим графики функций х = V - InV, у = (Ь/а)х , у = = InU- U+C.
В силу равенства dx/dV = (V- 1)/У функция х = V- In К, определенная при V > 0, возрастает, если V> 1, и убывает, если V 1. В силу того, что cPx/dV 1 = 1/F 2 > 0, график функции л: = x(V) направлен выпуклостью вниз. Уравнение V= 0 задает вертикальную асимптоту. Наклонных асимптот эта функция не имеет. Поэтому график функции х = х(У) имеет вид кривой, изображенной в первой четверти рис. 6.10.
Аналогичным образом исследуется функция у = InU - U+ С, график которой на рис. 6.10 изображен в третьей четверти.
Если теперь мы разместим на рис. 6.10 во второй четверти график функции у = (Ь/а)х , то в четвертой четверти получим линию, которая связывает переменные U и V. Действительно, взяв точку V t на оси OV, вычисляем с помощью функции х = V - V соответствующее знание х х. После этого, используя функцию у = (Ь/а)х , по полученному значению х { находим у х (вторая четверть на рис. 6.10). Далее с помощью графика функции у = InU - U + С определяем соответствующие значения переменной U (на рис. 6.10 таких значений два - координаты точек М и N). Совокупность всех таких точек (V; U) образует искомую кривую. Из построения следует, что графиком зависимости (6.19) является замкнутая линия, содержащая внутри себя точку Е( 1, 1).
Напомним, что эту кривую мы получили, задав некоторые начальные значения U 0 и V 0 и вычислив по ним константу С. Взяв другие начальные значения, мы получим другую замкнутую линию, не пересекающую первую и также содержащую внутри себя точку Е( 1, 1). Это означает, что семейством траекторий системы (6.19) на фазовой плоскости (V, U) является множество замкнутых непересекающихся линий, концентрирующихся вокруг точки Е( 1, 1), а решения исходной модели U = Щ) и V = V{t) являются функциями, периодическими во времени. При этом максимум функции U = U(t) не попадает на максимум функции V = V(t ) и наоборот, т. е. колебания численности популяций около своих равновесных решений происходят в разных фазах.
На рис. 6.11 приведены четыре траектории системы дифференциальных уравнений (6.19) на фазовой плоскости OUV, отличающиеся начальными условиями. Одна из траекторий равновесная - это точка Е( 1, 1), которой соответствует решение U(t) = 1, V{t) = 1. Точки (U(t), V(t)) на других трех фазовых траекториях по мере увеличения времени смещаются по часовой стрелке.
Чтобы пояснить действие механизма изменения численности двух популяций, рассмотрим траекторию ABCDA на рис. 6.11. Как видим, на участке АВ и хищников, и жертв мало. Поэтому здесь популяция хищников сокращается из-за недостатка корма, а популяция жертв растет. На участке ВС численность жертв достигает высоких значений, что приводит к росту численности хищников. На участке СА хищников много, и это влечет сокращение численности жертв. При этом после прохождения точки D численность жертв уменьшается на столько, что численность популяции начинает уменьшаться. Цикл замыкается.
Модель «хищник - жертва» - пример структурно неустойчивой модели. Здесь малое изменение правой части одного из уравнений может привести к принципиальному изменению ее фазового портрета.

Рис. 6.11.

Рис. 6.12.
Действительно, если в уравнении динамики жертв учесть внутривидовую конкуренцию, то мы получим систему дифференциальных уравнений:
Здесь при т = 0 популяция жертв развивается согласно логическому закону.
При т Ф 0 ненулевое равновесное решение системы (6.21) при некоторых положительных значениях параметра внутривидовой конкуренции И является устойчивым фокусом, и соответствующие траектории «наматываются» на точку равновесия (рис. 6.12). Если же h = 0, то в этом случае особая точка Е( 1, 1) системы (6.19) является центром, и траектории представляют собой замкнутые линии (см. рис. 6.11).
Замечание. Обычно под моделью «хищник - жертва» понимают модель (6.19), фазовые траектории которой замкнуты. Однако модель (6.21) также является моделью «хищник - жертва», поскольку описывает взаимовлияние хищников и жертв.
Одним из первых приложений модели типа «хищник - жертва» в экономике для исследования циклично изменяющихся процессов является макроэкономическая модель Гудвина, в которой используется непрерывный подход к анализу взаимовлияния уровня занятости и ставки заработной платы.
В работе В.-Б. Занга изложен вариант модели Гудвина, в котором производительность труда и предложение труда растут с постоянными темпами прироста, а коэффициент выбытия фондов равен нулю. Эта модель формально приводит к уравнениям модели «хищник - жертва».
Ниже рассматривается модификация этой модели для случая отличного от нуля коэффициента выбытия фондов.
В модели используются следующие обозначения: L - численность трудящихся; w - средняя ставка заработной платы трудящихся; К - основные производственные фонды (капитал); Y - национальный доход; / - инвестиции; С - потребление; р - коэффициент выбытия фондов; N - предложение труда на рынке рабочей силы; т = Y/K - фондоотдача; а = Y/L - производительность труда; у = L/N - коэффициент занятости; х = C/Y - норма потребления в национальном доходе; К - приращение капитала в зависимости от инвестиций.
Выпишем уравнения модели Гудвина:

где а 0 , b, g, п, N 0 , г - положительные числа (параметры).
Уравнения (6.22) - (6.24) выражают следующее. Уравнение (6.22) - обычное уравнение динамики фондов. Уравнение (6.23) отражает рост ставки заработной платы при высоком уровне занятости (ставка заработной платы растет, если предложение труда невелико) и уменьшение ставки заработной платы при высоком уровне безработицы.
Тем самым уравнение (6.23) выражает закон Филлипса в линейной форме . Уравнения (6.24) означают экспоненциальный рост производительности труда и предложения труда. Предположим также, что С = wL, т. е. вся заработная плата тратится на потребление. Теперь можно преобразовать уравнения модели с учетом равенств:

Преобразуем уравнения (6.22)-(6.27). Имеем:
 где
где
где
![]()
Поэтому динамика переменных в модели Гудвина описывается системой дифференциальных уравнений:

которая формально совпадает с уравнениями классической модели «хищник - жертва». Это значит, что в модели Гудвина тоже возникают колебания фазовых переменных. Механизм колебательной динамики заключается здесь в следующем: при малой заработной плате w потребление низкое, инвестиции большие, и это приводит к росту производства и занятости у. Большая занятость у вызывает рост средней заработной платы w, что приводит к росту потребления и снижению инвестиций, падению производства и снижению занятости у.
Ниже гипотеза о зависимости ставки процента от уровня занятости рассмотренной модели используется при моделировании динамики однопродуктовой фирмы. Оказывается, что в этом случае при некоторых дополнительных допущениях модель фирмы обладает свойством цикличности рассмотренной выше модели «хищник - жертва».
- См.: Вольтерра В. Указ, соч.; Ризнииенко Г. Ю., Рубин А. Б. Указ. соч.
- См.: Занг В.-Б. Синергетическая экономика. М., 2000.
- См.: Пу Т. Нелинейная экономическая динамика. Ижевск, 2000; Тихонов А. Н.Математическая модель // Математическая энциклопедия. Т. 3. М., 1982. С. 574, 575.
В модели Колмогорова сделано одно существенное допущение: поскольку предполагается, что при то это означает существование в популяции жертв механизмов, регулирующих их численность даже в отсутствие хищников.
К сожалению, подобная формулировка модели не позволяет ответить на вопрос, вокруг которого в последнее время ведется много споров и о котором мы уже упоминали в начале главы: каким образом популяция хищников может оказывать регулирующее воздействие на популяцию жертв с тем, чтобы вся система была устойчива? Поэтому мы вернемся к модели (2.1), в которой механизмы саморегуляции (например, регулирование при помощи внутривидовой конкуренции) в популяции жертв (впрочем, как и в популяции хищников) отсутствуют; поэтому единственным механизмом регуляции численностей, входящих в сообщество видов, являются трофические взаимоотношения между хищниками и жертвами.
Здесь (так что, в отличие от предыдущей модели, Естественно, что решения (2.1) зависят от конкретного вида трофической функции которая, в свою очередь, определяется характером хищничества, т. е. трофической стратегией хищника и защитной стратегией жертвы. Общими для всех этих функций (см. рис. И) являются следующие свойства:
Система (2.1) имеет одну нетривиальную стационарную точку, координаты которой определяются из уравнений
![]()
при естественном ограничении .
Существует еще одна стационарная точка (0, 0), соответствующая тривиальному равновесию. Нетрудно показать, что эта точка - седло, а сепаратрисами являются координатные оси.
Характеристическое уравнение для точки имеет вид
![]()
Очевидно, что для классической вольтерровской модели .
Поэтому величину f можно рассматривать как меру отклонения рассматриваемой модели от вольтерровской.
![]()
стационарная точка - фокус, и в системе появляются колебания; при выполнении противоположного неравенства - узел, и колебания в системе отсутствуют. Устойчивость этого состояния равновесия определяется условием
т. е. существенным образом зависит от вида трофической функции хищника.
Условие (5.5) можно интерпретировать следующим образом: для устойчивости нетривиального равновесия системы хищник - жертва (и тем самым, для существования этой системы) достаточно, чтобы в окрестности этого состояния относительная доля потребляемых хищником жертв возрастала с возрастанием численности жертв. Действительно, доля жертв (от общей их численности), потребляемых хищником, описывается дифференцируемой функцией условие возрастания которой (положительность производной) выглядит как
![]()
Последнее условие, взятое в точке есть не что иное, как условие (5.5) устойчивости равновесия. При непрерывности оно должно выполняться и в некоторой окрестности точки Таким образом, если численности жертв в этой окрестности, то
Пусть теперь трофическая функция V имеет вид, изображенный на рис. 11, а (характерный для беспозвоночных). Можно показать, что для всех конечных значений (поскольку выпукла вверх)
т. е. при любых величинах стационарной численности жертв неравенство (5.5) не выполняется.
Это означает, что в системе с таким видом трофической функции не существует устойчивого нетривиального равновесия. Возможны несколько исходов: либо численности как жертвы, так и хищника неограниченно возрастают, либо (при прохождении траектории вблизи одной из координатных осей) в силу случайных причин численность жертвы или численность хищника станет равной нулю. При гибели жертвы через некоторое время погибнет и хищник, если же сначала погибает хищник, то численность жертвы начнет экспоненциально возрастать. Третий вариант - возникновение устойчивого предельного цикла - невозможен, что легко доказывается.
В самом деле, выражение

в положительном квадранте всегда положительно, если только имеет вид, изображенный на рис. 11, а. Тогда, согласно критерию Дюлака в этой области отсутствуют замкнутые траектории и устойчивого предельного цикла существовать не может.
Итак, можно сделать вывод: если трофическая функция имеет вид, изображенный на рис. 11, а, то хищник не может быть регулятором, обеспечивающим стабильность популяции жертвы и тем самым устойчивость всей системы в целом. Система может быть устойчива только в том случае, когда в популяции жертвы существуют собственные внутренние регулирующие механизмы, например, внутривидовая конкуренция или эпизоотии. Этот вариант регулирования был уже рассмотрен в §§ 3, 4.
Ранее отмечалось, что такой тип трофической функции характерен для хищников-насекомых, «жертвами» которых также обычно являются насекомые. С другой стороны, наблюдения за динамикой многих природных сообществ типа «хищник - жертва», включающих в себя виды насекомых, показывают, что для них характерны колебания очень большой амплитуды и весьма специфического вида.
Обычно после более или менее постепенного роста численности (который может происходить либо монотонно, либо в виде колебаний с возрастающей амплитудой) происходит ее резкое падение (рис. 14), и затем картина повторяется. По-видимому, такой характер динамики численностей видов насекомых может быть объяснен неустойчивостью этой системы при малых и средних значениях численности и действием мощных внутрипопуляционных регуляторов численности при больших ее значениях.

Рис. 14. Динамика численности популяции австралийской листоблошки Cardiaspina albitextura, кормящейся на эвкалиптах. (Из статьи: Clark L. R. The population dynamics of Cardiaspina albitextura.-Austr. J. Zool., 1964, 12, № 3, p. 362-380.)
Если же в систему «хищник - жертва» входят виды, способные к достаточно сложному поведению (например, хищники способны к обучению или жертвы способны находить убежище), то в такой системе возможно существование устойчивого нетривиального равновесия. Доказывается это утверждение весьма просто.
В самом деле, трофическая функция тогда должна иметь вид, изображенной на рис. 11, в. Точка на этом графике - точка касания прямой, проведенной из начала координат, графика трофической функции Очевидно, что в этой точке функция имеет максимум. Также легко показывается, что для всех выполняется условие (5.5). Следовательно, нетривиальное равновесие, в котором численность жертв меньше будет асимптотически устойчиво
Однако мы ничего не можем сказать о том, сколь велика область устойчивости этого равновесия. Например, если существует неустойчивый предельный цикл, то эта область должна лежать внутри цикла. Или другой вариант: нетривиальное равновесие (5.2) неустойчиво, но существует устойчивый предельный цикл; в этом случае также можно говорить о стабильности системы хищник - жертва. Поскольку выражение (5.7) при выборе трофической функции типа рис. 11, в может менять знак при изменении при , то критерий Дюлака здесь не работает и вопрос о существовании предельных циклов остается открытым.

Модели взаимодействия двух видов
Гипотезы Вольтерра. Аналогии с химической кинетикой. Вольтерровские модели взаимодействий. Классификация типов взаимодействий Конкуренция. Хищник-жертва. Обобщенные модели взаимодействия видов. Модель Колмогорова. Модель взаимодействия двух видов насекомых Макартура. Параметрический и фазовые портреты системы Базыкина.
Основателемсовременной математической теории популяций справедливо считается итальянский математик Вито Вольтерра, разработавший математическую теорию биологических сообществ, аппаратом которой служат дифференциальные и интегро-дифференциальные уравнения. (Vito Volterra. Lecons sur la Theorie Mathematique de la Lutte pour la Vie. Paris , 1931). В последующие десятилетия популяционная динамика развивалась, в основном, в русле высказанных в этой книге идей. Русский перевод книги Вольтерра вышел в 1976 г. под названием: «Математическая теория борьбы за существование» с послесловием Ю.М. Свирежева, в котором рассматривается история развития математической экологии в период 1931‑1976 гг.
Книга Вольтерра написана так, как пишут книги по математике. В ней сначала сформулированы некоторые предположения о математических объектах, которые предполагается изучать, а затем проводится математическое исследование свойств этих объектов.
Системы, изученные Вольтерра, состоят их двух или нескольких видов. В отдельных случаях рассматривается запас используемой пищи. В основу уравнений, описывающих взаимодействие этих видов, положены следующие представления.
Гипотезы Вольтерра
1. Пища либо имеется в неограниченном количестве, либо ее поступление с течением времени жестко регламентировано.
2. Особи каждого вида отмирают так, что в единицу времени погибает постоянная доля существующих особей.
3. Хищные виды поедают жертв, причем в единицу времени количество съеденных жертв всегда пропорционально вероятности встречи особей этих двух видов, т.е. произведению количества хищников на количество жертв.
4. Если имеется пища в ограниченном количестве и несколько видов, которые способны ее потреблять, то доля пищи, потребляемой видом в единицу времени, пропорциональна количеству особей этого вида, взятому с некоторым коэффициентом, зависящим от вида (модели межвидовой конкуренции).
5. Если вид питается пищей, имеющейся в неограниченном количестве, прирост численности вида в единицу времени пропорционален численности вида.
6. Если вид питается пищей, имеющейся в ограниченном количестве, то его размножение регулируется скоростью потребления пищи, т.е. за единицу времени прирост пропорционален количеству съеденной пищи.
Аналогии с химической кинетикой
Эти гипотезы имеют близкие параллели с химической кинетикой. В уравнениях популяционной динамики, как и в уравнениях химической кинетики, используется “принцип соударений”, когда скорость реакции пропорциональна произведению концентраций реагирующих компонентов.
Действительно, согласно гипотезам Вольтерра, скорость процесса отмирания каждого вида пропорциональна численности вида. В химической кинетике это соответствует мономолекулярной реакции распада некоторого вещества, а в математической модели – отрицательным линейным членам в правых частях уравнений.
Согласно представлениям химической кинетики, скорость бимолекулярной реакции взаимодействия двух веществ пропорциональна вероятности столкновения этих веществ, т.е. произведению их концентрации. Точно так же, в соответствии с гипотезами Вольтерра, скорость размножения хищников (гибели жертв) пропорциональна вероятности встреч особей хищника и жертвы, т.е. произведению их численностей. И в том и в другом случае в модельной системе появляются билинейные члены в правых частях соответствующих уравнений.
Наконец, линейные положительные члены в правых частях уравнений Вольтерра, отвечающие росту популяций в неограниченных условиях, соответствуют автокаталитическим членам химических реакций. Такое сходство уравнений в химических и экологических моделях позволяет применить для математического моделирования кинетики популяций те же методы исследований, что и для систем химических реакций.
Классификация типов взаимодействий
В соответствии с гипотезами Вольтерра взаимодействие двух видов, численности которых x 1 иx 2 , могут быть описаны уравнениями:
(9.1)
Здесь параметры a i ‑ константы собственной скорости роста видов, c i ‑ константы самоограничения численности (внутривидовой конкуренции), b ij ‑ константы взаимодействия видов, (i , j= 1,2). Знаки этих коэффициентов определяют тип взаимодействия.
В биологической литературе обычно классифицируют взаимодействия по участвующим в них механизмам. Разнообразие здесь огромно: различные трофические взаимодействия, химические взаимодействия, существующие между бактериями и планктонными водорослями, взаимодействия грибов с другими организмами, сукцессии растительных организмов, связанные в частности, с конкуренцией за солнечный свет и с эволюцией почв и т.д. Такая классификация кажется необозримой.
E . Одум, учитывая предложенные В.Вольтерра модели, предложил классификацию не по механизмам, а по результатам. Согласно этой классификации, оценивать взаимоотношения следует как положительные, отрицательные или нейтральные в зависимости от того, возрастает, убывает или остается неизменной численность одного вида в присутствии другого вида. Тогда основные типы взаимодействий могут быть представлены в виде таблицы.
ТИПЫ ВЗАИМОДЕЙСТВИЯ ВИДОВ
|
СИМБИОЗ |
b 12 ,b 21 >0 |
||
|
КОММЕНСАЛИЗМ |
b 12 ,>0, b 21 =0 |
||
|
ХИЩНИК-ЖЕРТВА |
b 12 ,>0, b 21 <0 |
||
|
АМЕНСАЛИЗМ |
b 12 ,=0, b 21 <0 |
||
|
КОНКУРЕНЦИЯ |
b 12 , b 21 <0 |
||
|
НЕЙТРАЛИЗМ |
b 12 , b 21 =0 |
В последнем столбце указаны знаки коэффициентов взаимодействия из системы (9.1)
Рассмотрим основные типы взаимодействий
УравненияКОНКУРЕНЦИИ:
Как мы уже видели в лекции 6, уравнения конкуренции имеют вид:
 (9.2)
(9.2)
Стационарные решения системы:
(1).
![]()
Начало координат, при любых параметрах системы представляет собой неустойчивый узел.
(2).
![]() (9.3)
(9.3)
C тационарное состояние (9.3) представляет собой седло при a 1 >b 12 /с 2 и
устойчивый узел приa 1 12 /с 2 . Это условие означает, что вид вымирает, если его собственная скорость роста меньше некоторой критической величины.
(3).
![]() (9.4)
(9.4)
C тационарное решение (9.4) ¾ седло при a 2 >b 21 /c 1 и устойчивый узел при a 2< b 21 /c 1
(4).
![]() (9.5)
(9.5)
Стационарное состояние (9.5) характеризует сосуществование двух конкурирующих видов и представляет собой устойчивый узел в случае выполнения соотношения:
![]()
Отсюда следует неравенство:
b
12
b
21
позволяющее сформулировать условие сосуществования видов:
Произведение коэффициентов межпопуляционного взаимодействия меньше произведения коэффициентов внутри популяционного взаимодействия.
Действительно, пусть естественные скорости роста двух рассматриваемых видов a 1 , a 2 одинаковы. Тогда необходимым для устойчивости условием будет
c 2 > b 12 ,c 1 > b 21 .
Эти неравенства показывают, что увеличение численности одного из конкурентов сильнее подавляет его собственный рост, чем рост другого конкурента. Если численность обоих видов ограничивается, частично или полностью, различными ресурсами, приведенные выше неравенства справедливы. Если же оба вида имеют совершенно одинаковые потребности, то один из них окажется более жизнеспособным и вытеснит своего конкурента.
Поведение фазовых траекторий системы дает наглядное представление о возможных исходах конкуренции. Приравняем нулю правые части уравнений системы (9.2):
x 1 (a 1 –c 1 x 1 – b 12 x 2) = 0 (dx 1 /dt = 0),
x 2 (a 2 –b 21 x 1 – c 2 x 2) = 0 (dx 2 /dt = 0),
При этом получим уравнения для главных изоклин системы
x 2 = – b 21 x 1 / c 2 +a 2 /c 2 , x 2 = 0
– уравнения изоклин вертикальных касательных.
x 2 = – c 1 x 1 / b 12 +a 1 /b 12 , x 1 = 0
– уравнения изоклин вертикальных касательных.
Точки попарного пересечения изоклин вертикальных и горизонтальных касательных
систем представляют собой стационарные решения системы уравнений (9.2.), а их
координаты ![]() суть стационарные численности конкурирующих видов.
суть стационарные численности конкурирующих видов.
Возможное расположение главных изоклин в системе (9.2) изображено на рис.9.1. Рис. 9.1 а соответствует выживанию вида x 1 , рис. 9.1 б – выживанию вида x 2 , рис. 9.1 в – сосуществованию видов при выполнении условия (9.6). Рисунок 9.1 г демонстрирует триггерную систему. Здесь исход конкуренции зависит от начальных условий. Ненулевое для обоих видов стационарное состояние (9.5) – неустойчивое. Это – седло, через которое проходит сепаратриса, отделяющая области выживания каждого из видов.

Рис. 9.1. Расположение главных изоклин на фазовом портрете вольтерровской системы конкуренции двух видов (9.2) при разном соотношении параметров. Пояснения в тексте.
Для изучения конкуренции видов ставились эксперименты на самых различных организмах. Обычно выбирают два близкородственных вида и выращивают их вместе и по отдельности в строго контролируемых условиях. Через определенные промежутки времени проводят полный или выборочный учет численности популяции. Регистрируют данные по нескольким повторным экспериментам и анализируют. Исследования проводили на простейших (в частности, инфузориях), многих видах жуков рода Tribolium, дрозофиллах, пресноводных ракообразных (дафниях). Много экспериментов проводилось на микробных популяциях (см. лекция 11). В природе также проводили эксперименты, в том числена планариях (Рейнольдс), двух видах муравьев (Понтин) и др. На рис. 9.2. изображены кривые роста диатомовых водорослей, использующих один и тот же ресурс (занимающих одну и ту же экологическую нишу). При выращивании в монокультуре Asterionella Formosa выходит на постоянный уровень плотности и поддержвает концентрацию ресурса (силиката) на постоянно низком уровне. Б. При выращивании в монокультуре Synedrauina ведет себя сходным образом и поддерживает концентрацию силиката на еще более низком уровне. В. При совместном культивировании (в двух повторностях) Synedrauina вытесняет Asterionella Formosa . По-видимому, Synedra

Рис. 9.2. Конкуренция у диатомовых водорослей. а ‑ при выращивании в монокультуре Asterionella Formosa выходит на постоянный уровень плотности и поддерживает концентрацию ресурса (силиката) на постоянно низком уровне.б ‑ при выращивании в монокультуре Synedrauina ведет себя сходным образом и поддерживает концентрацию силиката на еще более низком уровне. в ‑ при совместном культивировании (в двух повторностях) Synedruina вытесняет Asterionella Formosa . По-видимому, Synedra выигрывает конкуренцию благодаря своей способности к более полному использованию субстрата (см. также Лекцию 11).
Широко известны эксперименты по изучению конкуренции Г. Гаузе, продемонстрировавшие выживание одного из конкурирующих видов и позволившие ему сформулировать «закон конкурентного исключения». Закон гласит, что в одной экологической нише может существовать только один вид. На рис. 9.3. приведены результаты экспериментов Гаузе для двух видов Parametium , занимающих одну экологическую нишу (рис. 9.3 а, б) и видами, занимающими разные экологические ниши (рис. 9.3. в).

Рис. 9.3. а - Кривые роста популяций двух видов Parametium в одновидовыхкультурах. Черные кружки – P Aurelia , белые кружки – P . Caudatum
б - Кривые роста P Aurelia и P . Caudatum в смешанной культуре.
По Gause , 1934
Модель конкуренции (9.2) имеет недостатки, в частности, из нее следует, что сосуществование двух видов возможно лишь в случае, если их численность ограничивается разными факторами, но модель не дает указаний, насколько велики должны быть различия для обеспечения длительного сосуществования. В то же время известно, что для длительного сосуществования в изменчивой среде необходимо различие, достигающее определенной величины. Внесение в модель стохастических элементов (например, введение функции использования ресурса) позволяет количественно исследовать эти вопросы.
Система ХИЩНИК+ЖЕРТВА
 (9.7)
(9.7)
Здесь, в отличие от (9.2) знаки b 12 и b 21 - разные. Как и в случае конкуренции, начало координат
![]() (9.8)
(9.8)
является особой точкой типа неустойчивый узел. Три других возможных стационарных состояния:
![]() ,(9.9)
,(9.9)
![]() (9.10)
(9.10)
![]() (9.11)
(9.11)
Таким образом, возможно выживание только жертвы (9.10), только хищника (9.9) (если у него имеются и другие источники питания) и сосуществование обоих видов (9.11). Последний вариант уже был рассмотрен нами в лекции 5. Возможные типы фазовых портретов для системы хищник-жертва представлены на рис. 9.4.
Изоклины горизонтальных касательных представляют собой прямые
x 2 = – b 21 х 1 /c 2 + a 1 /c 2 , х 2 = 0,
а изоклины вертикальных касательных – прямые
x 2 = – c 1 х 1 /b 12 + a 2 /b 12 , х 1 = 0.
Стационарные точки лежат на пересечении изоклин вертикальных и горизонтальных касательных.

Из рис. 9.4 видно следующее. Система хищник – жертва (9.7) может иметь устойчивое положение равновесия, в кот o ром популяция жертв полностью вымерла ( ) и остались только хищники (точка 2 на рис. 9.4 а). Очевидно, такая ситуация может реализоваться лишь в случае, если кроме рассматриваемого вида жертв х 1 хищник х 2 – имеет дополнительные источники питания. Этот факт в модели отражается положительным членом в правой части уравнения для х 2 . Особые точки (1) и (3) (рис. 9.4 а ) являются неустойчивыми. Вторая возможность – устойчивое стационарное состояние, в котором популяция хищников полностью вымерла и остались одни жертвы – устойчивая точка (3) (рис. 9.4 6 ). Здесь особая точка (1) – также неустойчивый узел.
Наконец, третья возможность – устойчивое сосуществование популяций хищника и жертвы (рис. 9.4 в ), стационарные численности которых выражаются формулами (9.11).
Как и в случае одной популяции (см. Лекция 3), для модели (9.7) можно разработать стохастическую модель, но для нее нельзя получить решение в явном виде. Поэтому мы ограничимся общими рассуждениями. Допустим, например, что точка равновесия находится на некотором расстоянии от каждой из осей. Тогда для фазовых траекторий, на которых значения x 1 , x 2 остаются достаточно большими, вполне удовлетворительной будет детерминистическая модель. Но если в некоторой точке фазовой траектории какая–либо переменная не очень велика, то существенное значение могут приобрести случайные флюктуации. Они приводят к тому, что изображающая точка переместится на одну из осей, что означает вымирание соответствующего вида.
Таким образом, стохастическая модель оказывается неустойчивой, так как стохастический “дрейф” рано или поздно приводит к вымиранию одного из видов. В такого рода модели хищник в конечном счете вымирает, это может произойти либо случайно, либо вследствие того, что сначала элиминируется популяция его жертвы. Стохастическая модель системы хищник – жертва хорошо объясняет эксперименты Гаузе (Гаузе, 1934), в которых инфузория Paramettum candatum служила жертвой для другой инфузории Didinium nasatum – хищника. Ожидавшиеся согласно детерминистическим уравнениям (9.7) равновесные численности в этих экспериментах составляли примерно всего по пять особей каждого вида, так что нет ничего удивительного в том, что в каждом повторном эксперименте довольно быстро вымирали либо хищники, либо жертвы (а за ними и хищники) Результаты экспериментов представлены на рис. 9.5.

Рис . 9.5. Рост Parametium caudatum и хищной инфузории Dadinium nasutum . Из : Gause G.F. The struggle for existence. Baltimore , 1934
Итак, анализ вольтерровских моделей взаимодействия видов показывает, что, несмотря на большое разнообразие типов поведения таких систем, незатухающих колебаний численности в модели конкурирующих видов не может быть вовсе. Однако в природе и в эксперименте такие колебания наблюдаются. Необходимость их теоретического объяснения послужила одной из причин для формулировки модельных описаний в более общем виде.
Обобщенные модели взаимодействия двух видов
Было предложено большое число моделей, описывающих взаимодействие видов, правые части уравнений которых представляли собой функции численностей взаимодействующих популяций. Решался вопрос о выработке общих критериев, позволяющих установить, какого вида функции могут описать особенности поведения временного численности популяции, в том числе устойчивые колебания. Наиболее известные из этих моделей принадлежат Колмогорову (1935, переработанная статья ‑ 1972) и Розенцвейгу (1963).
 (9.12)
(9.12)
В модель заложены следующие предположения:
1) Хищники не взаимодействуют друг с другом, т.е. коэффициент размножения хищников k 2 и число жертв L , истребляемых в единицу времени одним хищником, не зависит от y.
2) Прирост числа жертв при наличии хищников равен приросту в отсутствие хищников минус число жертв, истребляемых хищниками. Функции k 1 (x ), k 2 (x ), L (x ), ‑ непрерывны и определены на положительной полуоси x , y ³ 0.
3) dk 1 /dx< 0. Это означает, что коэффициент размножения жертв в отсутствие хищника монотонно убывает с возрастанием численности жертв, что отражает ограниченность пищевых и иных ресурсов.
4) dk 2 / dx> 0, k 2 (0) < 0 < k 2 (¥ ). С ростом численности жертв коэффициент размножения хищников монотонно убывает с возрастанием численности жертв, переходя от отрицательных значений, (когда нечего есть) к положительным.
5) Число жертв, истребляемых одним хищником в единицу времени L (x )> 0 при N> 0; L (0)=0.
Возможные типы фазовых портретов системы (9.12) представлены на рис. 9.6:

Рис. 9.6. Фазовые портреты системы Колмогорова (9.12), описывающей взаимодействие двух видов при разных соотношениях параметров. Пояснения в тексте.
Стационарные решения (их два или три) имеют следующие координаты:
(1). ` x=0; ` y=0 .
Начало координат при любых значениях параметров представляет собой седло(рис. 9.6 а-г).
(2). ` x=A, ` y=0. (9.13)
A определяется из уравнения:
k 1 (A )=0.
Стационарное решение (9.13) ‑ седло, если B< A (рис. 9.6 а , б , г ), B определяется из уравнения
k 2 (B )=0
Точка (9.13) помещается в положительном квадранте, еслиB>A. Это ‑ устойчивый узел.
Последний случай, который соответствует гибели хищника и выживанию жертвы,представлен на рис. 9.6 в .
(3). ` x=B, ` y=C. (9.14)
Величина С определяется из уравнений:
Точка (9.14) – фокус (рис.9.6 а ) или узел (рис.9.6 г ), устойчивость которых зависит от знакавеличины s
s 2 = – k 1 (B) – k 1 (B )B+L (B )C.
Если s >0, точка устойчива, если s <0 ‑ точка неустойчива, и вокруг нее могут существовать предельные циклы (рис. 9.6 б )
В зарубежной литературе чаще рассматривается сходная модель, предложенная Розенцвейгом и Макартуром (1963):
 (9.15)
(9.15)
где f (x ) - скорость изменения численности жертв x в отсутствие хищников, Ф(x,y ) ‑ интенсивность хищничества, k ‑ коэффициент, характеризующий эффективность переработки биомассы жертвы в биомассу хищника, e - смертность хищника.
Модель (9.15) сводится к частному случаю модели Колмогорова (9.12) при следующих предположениях:
1) численность хищника ограничивается только численностью жертвы,
2) скорость, с которой данная особь хищника поедает жертву, зависит только от плотности популяции жертв и не зависит от плотности популяции хищников.
Тогда уравнения (9.15) принимают вид.
При описании взаимодействия реальных видов, правые части уравнений конкретизируются в соответствии с представлениями о биологических реалиях. Рассмотрим одну из самых популярных моделей такого типа.
Модельвзаимодействиядвух видов насекомых (M acArthur, 1971)
Модель, которую мы рассмотрим ниже, использовалась для решения практической задачи борьбы с вредными насекомыми с помощью стерилизации самцов одного из видов. Исходя из биологических особенностей взаимодействия видов, была написана следующая модель
 (9.16)
(9.16)
Здесь x,y - биомассы двух видов насекомых. Трофические взаимодействия описываемых в этой модели видов – весьма сложные. Этим определяется вид многочленов в правых частях уравнений.
Рассмотрим правую часть первого уравнения. Насекомые вида х поедают личинок вида у (член + k 3 y), но взрослые особи вида у поедают личинок вида х при условии высокой численности видов х или у или обоих видов (члены – k 4 xy, – у 2 ). При малых х смертность вида х выше, чем его естественный прирост (1–k 1 +k 2 x–x 2 < 0 при малых х). Во втором уравнении член k 5 отражает естественный прирост вида y; –k 6 y – самоограничение этого вида, –k 7 x – поедание личинок вида у насекомыми вида х, k 8 xy – прирост биомассы вида у за счет поедания взрослыми насекомыми вида у личинок вида х.
На рис. 9.7 представлен предельный цикл, являющийся траекторией устойчивого периодического решения системы (9.16).

Решение вопроса о том, каким образом обеспечить сосуществование популяции с ее биологическим окружением, разумеется, не может быть получено без учета специфики конкретной биологической системы и анализа всех ее взаимосвязей. Вместе с тем изучение формальных математических моделей позволяет ответить на некоторые общие вопросы. Можно утверждать, что для моделей типа (9.12) факт совместимости или несовместимости популяций не зависит от их начальной численности, а определяется только характером взаимодействия видов. Модель помогает ответить на вопрос: как следует воздействовать на биоценоз, управлять им, чтобы по возможности быстро уничтожить вредный вид.
Управление может сводиться к кратковременному, скачкообразному изменению величин численности х и у. Такой способ отвечает методам борьбы типа однократного уничтожения одной или обеих популяций химическими средствами. Из сформулированного выше утверждения видно, что для совместимых популяций этот метод борьбы будет малоэффективным, поскольку с течением времени система опять выйдет на стационарный режим.
Другой способ ‑ изменение вида функций взаимодействия между видами, например, при изменении значений параметров системы. Именно такому, параметрическому, способу отвечают биологические методы борьбы. Так при внедрении стерилизованных самцов уменьшается коэффициент естественного прироста популяции. Если при этом мы получим другой тип фазового портрета, такой, где имеется лишь устойчивое стационарное состояние с нулевой численностью вредителя, управление приведет к желаемому результату – уничтожению популяции вредного вида. Интересно отметить, что иногда воздействие целесообразно применить не к самому вредителю, а к его партнеру. Какой из способов более эффективен, в общем случае сказать нельзя. Это зависит от имеющихся в распоряжении средств управления и от явного вида функций, описывающих взаимодействие популяций.
Модель А.Д.Базыкина
Теоретический анализ моделей взаимодействий видов наиболее исчерпывающе проведен в книге А.Д.Базыкина “Биофизика взаимодействующих популяций” (М., Наука, 1985).
Рассмотрим одну из изученных в этой книге моделей типа хищник-жертва.
 (9.17)
(9.17)
Система (9.17) является обобщением простейшей модели хищник-жертва Вольтерра (5.17) с учетом эффекта насыщения хищников. В модели (5.17) предполагается, что интенсивность выедания жертв линейно растет с ростом плотности жертв, что при больших плотностях жертв не соответствует реальности. Для описания зависимости рациона хищника от плотности жертв могут быть выбраны разные функции. Наиболее существенно, чтобы выбранная функция с ростом x асимптотически стремилась к постоянному значению. В модели (9.6) использовалась логистическая зависимость. В модели Базыкина в роли такой функции выбрана гипербола x /(1+px ). Вспомним, что такой вид имеет формула Моно, описывающая зависимость скорость роста микроорганизмов от концентрации субстрата. Здесь в роли субстрата выступает жертва, а в роли микроорганизмов – хищник.
Система (9.17) зависит от семи параметров. Число параметров можно уменьшить с помощью замены переменных:
x ® (A/D )x; y ® (A/D )/y;
t ® (1/A )t; g (9.18)
и зависит от четырех параметров.
Для полного качественного исследования необходимо разбить четырехмерное пространство параметров на области с различным типом динамического поведения, т.е. построить параметрический, или структурный портрет системы.
Затем надо построить фазовые портреты для каждой из областей параметрического портрета и описать бифуркации, происходящие с фазовыми портретами на границах различных областей параметрического портрета.
Построение полного параметрического портрета производится в виде набора “срезов” (проекций) параметрического портрета малой размерности при фиксированных значениях некоторых из параметров.
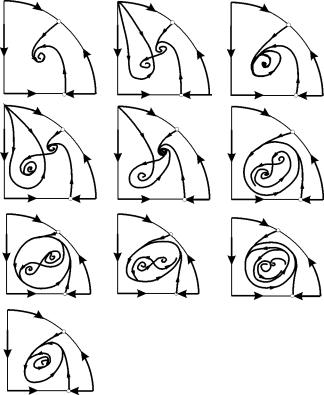
Параметрический портрет системы (9.18) при фиксированных g и малых e представлен на рис.9.8. Портрет содержит 10 областей с различным типом поведения фазовых траекторий.

Рис. 9.8. Параметрический портрет системы (9.18) при фиксированных g
и малых e
Поведение системы при различных соотношениях параметров может быть существенно различным (рис.9.9). В системе возможны:
1) одно устойчивое равновесие (области 1 и 5);
2) один устойчивый предельный цикл (области 3 и 8);
3) два устойчивых равновесия (область 2)
4) устойчивый предельный цикл и неустойчивое равновесие внутри него (области 6, 7, 9, 10)
5) устойчивый предельный цикл и устойчивое равновесие вне его (область 4).
В параметрических областях 7, 9, 10 область притяжения равновесия ограничивается неустойчивым предельным циклом, лежащим внутри устойчивого. Наиболее интересно устроен фазовый портрет, соответствующий области 6 на параметрическом портрете. Детально он изображен на рис. 9.10.
Область притяжения равновесия В 2 (заштрихована) представляет собой “улитку”, скручивающуюся с неустойчивого фокуса В 1 . Если известно, что в начальный момент времени система находилась в окрестности В 1 , то судить о том, придет ли соответствующая траектория в равновесие В 2 или на устойчивый предельный цикл, окружающий три точки равновесия С (седло), В 1 и В 2 можно лишь на основе вероятностных соображений.
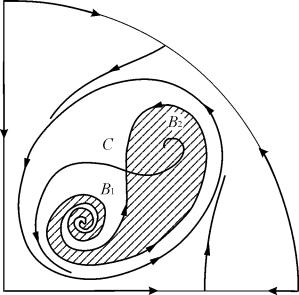
Рис.9.10. Фазовый портрет системы 9.18 для параметрической области 6. Область притяжения В 2 заштрихована
На параметрическом портрете (9.7) имеются 22 различные бифуркационные границы, которые образуют 7 различных типов бифуркаций. Их изучение позволяет выявить возможные типы поведения системы при изменении ее параметров. Например, при переходе из области 1 в область 3 происходит рождение малого предельного цикла, или мягкое рождение автоколебаний вокруг единственного равновесия В. Аналогичное мягкое рождение автоколебаний, но вокруг одного из равновесий, а именно B 1 , происходит при пересечении границы областей 2 и 4. При переходе из области 4 в область 5 устойчивый предельный цикл вокруг точки B 1 “лопается” на петле сепаратрис и единственной притягивающей точкой остается равновесие B 2 и т.д.
Особый интерес для практики представляет, конечно, выработка критериев близости системы к бифуркационным границам. Действительно, биологам хорошо известно свойство “буферности”, или “гибкости”, природных экологических систем. Этими терминами обычно обозначают способность системы как бы поглощать внешние воздействия. Пока интенсивность внешнего воздействия не превышает некоторой критической величины, поведение системы не претерпевает качественных изменений. На фазовой плоскости это соответствует возвращению системы в устойчивое состояние равновесия или на устойчивый предельный цикл, параметры которого не сильно отличаются от первоначального. Когда же интенсивность воздействия превышает допустимую, система “ломается”, переходит в качественно иной режим динамического поведения, например просто вымирает. Это явление соответствует бифуркационному переходу.
Каждый тип бифуркационных переходов имеет свои отличительные особенности, позволяющие судить об опасности такого перехода для экосистемы. Приведем некоторые общие критерии, свидетельствующие о близости опасной границы. Как и в случае одного вида, если при уменьшении численности одного из видов происходит “застревание” системы вблизи неустойчивой седловой точки, что выражается в очень медленном восстановлении численности к начальному значению, значит, система находится вблизи критической границы. Индикатором опасности служит также изменение формы колебаний численностей хищника и жертвы. Если из близких к гармоническим колебания становятся релаксационными, причем амплитуда колебаний увеличивается, это может привести к потере устойчивости системы и вымиранию одного из видов.
Дальнейшее углубление математической теории взаимодействия видов идет по линии детализации структуры самих популяций и учета временных и пространственных факторов.
Литература.
Колмогоров А.Н. Качественное изучение математических моделей динамики популяций. // Пороблемы кибернетики. М ., 1972, Вып .5.
MacArtur R. Graphycal analysis of ecological systems// Division of biology report Perinceton University. 1971
А.Д.Базыкин “Биофизика взаимодействующих популяций”. М., Наука, 1985.
В.Вольтерра: «Математическая теория борьбы за существование». М .. Наука , 1976
Gause G.F. The struggle for existence. Baltimore, 1934.
Модель ситуации типа «хищник-жертва»
Рассмотрим математическую модель динамики сосуществования двух биологических видов (популяций), взаимодействующих между собой по типу «хищник-жертва» (волки и кролики, щуки и караси и т.д.), называемую моделью Волътера-Лотки. Впервые она была получена А. Лоткой (1925 г.), А чуть позже и независимо от Лотки аналогичные и более сложные модели были разработаны итальянским математиком В. Вольтерра (1926 г.), работы которого фактически заложили основы так называемой математической экологии.
Пусть есть два биологических вида, которые совместно обитают в изолированной среде. При этом предполагается:
- 1. Жертва может найти достаточно пищи для пропитания;
- 2. При каждой встрече жертвы с хищником последний убивает жертву.
Будем для определённости называть их карасями и щуками. Пусть
состояние системы определяется величинами x(t) и y(t) - количеством карасей и щук в момент г. Чтобы получить математические уравнения, которые приближенно описывают динамику (изменение во времени) популяции, поступим следующим образом.
Как и в предыдущей модели роста популяции (см. п. 1.1) для жертв имеем уравнение
где а > 0 (рождаемость превышает смертность)
Коэффициент а прироста жертв зависит от количества хищников (уменьшается с их увеличением). В простейшем случае а- а - fjy (а>0,р>0). Тогда для численности популяции жертв имеем дифференциальное уравнение
Для популяции хищников имеем уравнение

где b >0 (смертность превышает рождаемость).
Коэффициент b убывания хищников уменьшается, если имеются жертвы, которыми можно питаться. В простейшем случае можно принять b - у -Sx {у > 0, S > 0). Тогда для численности популяции хищников получим дифференциальное уравнение

Таким образом, уравнения (1.5) и (1.6) представляют собой математическую модель рассматриваемой задачи взаимодействия популяций. В этой модели переменные х,у - состояние системы, а коэффициенты характеризуют ее структуру. Нелинейная система (1.5), (1.6) и есть модель Вольтера-Лотки.
Уравнения (1.5) и (1.6) следует дополнить начальными условиями - заданными значениями начальных популяций.
Проведем теперь анализ построенной математической модели.
Посгроим фазовый портрет системы (1.5), (1.6) (по смыслу задачи х > 0, v >0). Разделив уравнение (1.5) на уравнение (1.6), получим уравнение с разделяющимися переменными
Игшлрируя это уравнение, будем иметь
Соотношение (1.7) даёт уравнение фазовых траекторий в неявном виде. Система (1.5), (1.6) имеет стационарное состояние определяемое из

Из уравнений (1.8) получим (т.к. л* Ф 0, у* Ф 0)
Равенства (1.9) определяют на фазовой плоскости положение равновесия (точку О) (Рис. 1.6).

Направление движения по фазовой траектории можно определить из таких соображений. Пусть карасей мало. г.е. х ~ 0, тогда из уравнения (1.6) у
Все фазовые траектории (за исключением точки 0) замкнутые кривые, охватывающие положение равновесия. Состоянию равновесия соответствует неизменное количество х« и у« карасей и щук. Караси размножаются, щуки их едят, вымирают, но число тех и дрч их не меняется. "Замкнутым фазовым траекториям соответствует периодическое изменение численности карасей и щук. Причём то, по какой траектории движется фазовая точка, зависит от начальных условий. Рассмотрим, как меняется состояние вдоль фазовой траектории. Пусть точка находится в положении А (рис. 1.6). Здесь карасей мало, щук много; щукам есть нечего, и они постепенно вымирают и почти
совсем исчезают. Но и количество карасей тоже уменьшается почти до нуля и
только потом, когда щук стало меньше, чем у , начинается прирост количества карасей; скорость их прироста увеличивается и их число увеличивается - так происходит примерно до точки В. Но увеличение числа карасей приводит к торможению процесса вымирания шук и их число начинает расти (пищи стало больше) - участок ВС. Далее щук много, они едят карасей и почти всех съедают (участок CD). После этого щуки снова начинают вымирать и процесс повторяется с периодом примерно в 5-7 лет. На рис. 1.7 качественно построены кривые изменения численности карасей и щук в зависимости от времени. Максимумы кривых чередуются, причём максимумы численности щук отстают от максимумов карасей.

Такое поведение характерно для различных систем типа хищник - жертва. Проведем теперь интерпретацию полученных результатов.
Несмотря на то, что рассмотренная модель является простейшей и в действительности всё происходит гораздо сложнее, она позво.чила объяснить кое-что из загадочного, чго есть в природе. Понятны рассказы рыболовов о периодах, когда «щуки сами прыгают в руки», получила объяснение периодичность протекания хронических болезней и т.д.
Отметим еще один интересный вывод, который можно сделать из Рис. 1.6. Если в точке Р происходит быстрый отлов щук (в другой терминологии - отстрел волков), то система «перепрыгивает » в точку Q, и дальнейшее движение происходит по замкнутой траектории меньшего размера, что интуитивно ожидаемо. Если же уменьшить число щук в точке R, то система перейдет в точку S, и дальнейшее движение будет происходить по траектории большего размера. Амплитуды колебаний увеличатся. Это противоречит интуиции, но как раз объясняет такое явление: в результате отстрела волков их численность увеличивается со временем. Таким образом, важным в этом случае является выбор момента отстрела.
Предположим, что две популяции насекомых (например, тля и божья коровка, которая есть тлю) находились в естественном равновесии х-х*,у = у* (точка О на Рис. 1.6). Рассмотрим влияние разового применения инсектицида, который убивает х> 0 из жертв и у > 0 из хищников, не уничтожая их полностью. Уменьшение численности обеих популяций приводит к тому, что изображающая точка из положения О «перескочит» ближе к началу координат, где х > 0, у 0 (Рис. 1.6) Отсюда следует, что в результате действия инсектицида, призванного уничтожать жертв (тлю), число жертв (тли) увеличивается, а число хищников (божьих коровок) уменьшается. Получается, что численность хищников может стать настолько малой, что им будет фозить полное исчезновение но другим причинам (засуха, болезни и т.д.). Таким образом, применение инсектицидов (если только они не уничтожают вредных насекомых практически полностью) в конечном счёте приводит к увеличению популяции тех насекомых, численность которых находилась под контролем других насекомых-хищников. Такие случаи описаны в книгах по биологии.
В общем случае коэффициент прироста количества жертв а зависит и от Л" и от у: а = а(х, у) (из-за наличия хищников и из-за ограничений на пищу).
При малом изменении модели (1.5), (1.6) к правым частям уравнений добавляются малые члены (учитывающие, например, конкуренцию карасей за пищу и щук за карасей)
здесь 0 f.i « 1.
В таком случае вывод о периодичности процесса (возвращении системы к исходному состоянию), справедливый для модели (1.5), (1.6), теряет силу. В зависимости от вида малых поправок/ и g возможны ситуации, показанные на Рис. 1.8.

В случае (1) равновесное состояние О устойчиво. При любых других начальных условиях через достаточно большое время устанавливается именно оно.
В случае (2) система «идёт в разнос». Стационарное состояние неустойчиво. Такая система в конце концов попадает в такую область значений х и у, что модель перестаёт быть применимой.
В случае (3) в системе с неустойчивым стационарным состоянием О устанавливается с течением времени периодический режим. В отличие от исходной модели (1.5), (1.6) в этой модели установившийся периодический режим не зависит от начальных условий. Первоначально малое отклонение от стационарного состояния О приводит не к малым колебаниям около О , как в модели Вольтерра-Лотки, а к колебаним вполне определённой (и не зависящей от малости отклонения) амплитуды.
В.И. Арнольд называет модель Вольтерра-Лотки жесткой, т.к. её малое изменение может привести к выводам, отличным от приведенных выше. Для суждения о том, какая из ситуаций, указанных на Рис. 1.8, реализуется в данной системе, совершенно необходима дополнительная информация о системе (о виде малых поправок/ и g ).
к договору от ___.___,20___ г. об оказании платных образовательных услуг
Министерство образования и науки Российской Федерации
Лысьвенский филиал
Пермского Государственного технического университета
Кафедра ЕН
по дисциплине «Моделирование систем»
тема: Система хищник-жертва
Выполнил:
Студент гр. БИВТ-06
------------------
Проверил преподаватель:
Шестаков А. П.
Лысьва, 2010 г.
Реферат
Хищничество - трофические отношения между организмами, при которых один из них (хищник) атакует другого (жертву) и питается частями его тела, то есть обычно присутствует акт умерщвления жертвы. Хищничество противопоставляется поеданию трупов (некрофагии) и органических продуктов их разложения (детритофагии).
Довольно популярно также другое определение хищничества, предлагающее хищниками называть лишь организмы, поедающие животных, в отличие от растительноядных, поедающих растения.
Кроме многоклеточных животных, в роли хищников могут выступать протисты, грибы и высшие растения.
Размер популяции хищников влияет на размер популяции их жертв и наоборот, динамика популяций описывается математической моделью Лотки-Вольтерра, однако данная модель является высокой степенью абстракции, и не описывает реальные взаимосвязи между хищником и жертвой, и может рассматриваться только как первая степень приближения математической абстракции.
В процессе совместной эволюции хищники и жертвы приспосабливаются друг к другу. У хищников появляются и развиваются средства обнаружения и атаки, а у жертв - средства скрытности и защиты. Поэтому наибольший вред жертвам могут нанести новые для них хищники, с которыми те не вступали ещё в «гонку вооружений».
Хищники могут специализироваться на одном–нескольких видах для добычи, это делает их в среднем более успешными в охоте, но повышает зависимость от данных видов.
Система хищник-жертва.
Взаимодействие хищник-жертва - основной тип вертикальных взаимоотношений организмов, при котором по пищевым цепям передаются вещество и энергия.
Равновесность В. х. - ж. наиболее легко достигается в том случае, если в пищевой цепи имеется не менее трех звеньев (например, трава - полёвка - лисица). При этом плотность популяции фитофага регулируется взаимоотношениями как с нижним, так и с верхним звеном пищевой цепи.
В зависимости от характера жертв и типа хищника (истинный, пастбищник) возможна разная зависимость динамики их популяций. При этом картина осложняется тем, что хищники очень редко бывают монофагами (т. е. питающимися одним видом жертвы). Чаще всего, когда истощается популяция одного вида жертвы и ее добывание требует слишком больших затрат сил, хищники переключаются на другие виды жертв. Кроме того, одну популяцию жертв может эксплуатировать несколько видов хищников.
По этой причине часто описываемый в экологической литературе эффект пульсирования численности популяции жертвы, за которым с определенным запаздыванием пульсирует численность популяции хищника, в природе встречается крайне редко.
Равновесие между хищниками и жертвами у животных поддерживается специальными механизмами, исключающими полное истребление жертв. Так, жертвы могут:
- убегать от хищника (в этом случае в результате соревнования повышается подвижность и жертв, и хищников, что особенно характерно для степных животных, которым негде прятаться от преследователей);
- приобретать защитную окраску (<притворяться> листьями или сучками) или, напротив, яркий (например, красный) цвет, предупреждающий хищника о горьком вкусе;
- прятаться в укрытия;
- переходить к мерам активной обороны (рогатые травоядные, колючие рыбы), часто совместной (птицы-жертвы коллективно отгоняют коршуна, самцы оленей и сайгаков занимают <круговую оборону> от волков и т. д.).


 отчетность компаний РФ")




